This three-part story is about the first employment of an Intelligent Agent system on a U.S. Submarine in the year 2026. The scenario demonstrates how an Intelligent Agent can help solve a complex war-fighting problem by sifting through and interpreting tremendous amounts of data and thereby increasing the probability of mission success. The scenario provides a high degree of ambiguity, but the Intelligent Agent helps lift the fog of war by offering the commanding officer an Information Advantage.
Part Two: The Takedown of the Iron Fist
 It always starts on the mid-watch, and New England’s engagement with the Iron Fist was no different. At 0200 on 19 May 2026, the Intelligent Agent alerted on an Unmanned Underwater Vehicle (UUV) detection of a vessel in the western transit lane as a possible candidate for the Iron Fist. This alert was not the first New England had on this mission, but as the situation developed, it began to look more compelling than the others. Unfortunately, at 0215, a second vessel alerted on the eastern transit lane. Simultaneous candidates! This was a problem since New England was down to its last Unmanned Airborne Vehicle (UAV). It could cover one, but probably not both candidates. If the wrong candidate was picked, New England would have to do the visual confirmation of Iron Fist with organic sensors and would have to monitor the Iron Fist’s location itself for over 100 nm since the remote UAV tracking sensor could not be deployed. This possibility was considerably more challenging and significantly more dangerous for the crew. Identifying the right vessel as the Iron Fist was vital.
It always starts on the mid-watch, and New England’s engagement with the Iron Fist was no different. At 0200 on 19 May 2026, the Intelligent Agent alerted on an Unmanned Underwater Vehicle (UUV) detection of a vessel in the western transit lane as a possible candidate for the Iron Fist. This alert was not the first New England had on this mission, but as the situation developed, it began to look more compelling than the others. Unfortunately, at 0215, a second vessel alerted on the eastern transit lane. Simultaneous candidates! This was a problem since New England was down to its last Unmanned Airborne Vehicle (UAV). It could cover one, but probably not both candidates. If the wrong candidate was picked, New England would have to do the visual confirmation of Iron Fist with organic sensors and would have to monitor the Iron Fist’s location itself for over 100 nm since the remote UAV tracking sensor could not be deployed. This possibility was considerably more challenging and significantly more dangerous for the crew. Identifying the right vessel as the Iron Fist was vital.
 Iron Fist was a Roll On/Roll Off ship, a “RoRo,” a fairly common commercial vessel. With the development of UUV technology, it was discovered that these vessels had a unique acoustic characteristic, caused by the bow shape, that helped to identify them from other vessels. Additionally, with UUVs, detailed acoustic maps of many vessels could be made quickly as well as fine hull measurements such as length, width, and volume. The Intelligent Agent could then compare these measurements against known standards. Thousands of measurements could be taken by the UUV’s sensors. While 100% correlation against the standard was not possible because of environmental and other variables, a 20% correlation was reasonable, and a greater than 50% correlation would be compelling. The Intelligent Agent would map the acoustic and spatial relationships and present this relationship pattern to the operators who would do the pattern comparisons. Just 10 years ago, in 2016, the existence of such patterns was unknown. Since then, breakthroughs made possible by close UUV sensors resulted in new ways of classifying vessels by their acoustic and spatial patterns. Classification was still challenging for submarines using organic sensors, but the use of UUVs for classification was a significant tactical advantage.
Iron Fist was a Roll On/Roll Off ship, a “RoRo,” a fairly common commercial vessel. With the development of UUV technology, it was discovered that these vessels had a unique acoustic characteristic, caused by the bow shape, that helped to identify them from other vessels. Additionally, with UUVs, detailed acoustic maps of many vessels could be made quickly as well as fine hull measurements such as length, width, and volume. The Intelligent Agent could then compare these measurements against known standards. Thousands of measurements could be taken by the UUV’s sensors. While 100% correlation against the standard was not possible because of environmental and other variables, a 20% correlation was reasonable, and a greater than 50% correlation would be compelling. The Intelligent Agent would map the acoustic and spatial relationships and present this relationship pattern to the operators who would do the pattern comparisons. Just 10 years ago, in 2016, the existence of such patterns was unknown. Since then, breakthroughs made possible by close UUV sensors resulted in new ways of classifying vessels by their acoustic and spatial patterns. Classification was still challenging for submarines using organic sensors, but the use of UUVs for classification was a significant tactical advantage.
Then, the Intelligent Agent reported a significant breakthrough; a possible deceptive action by one of the candidate vessels. The Intelligent Agent program synthesizes information from all sources, and this included a national-level system that collected global reports from the Automated Information System (AIS). Vessels larger than a certain size are required to broadcast their names, navigation information, and destination on AIS. The vessel that the Intelligent Agent had alerted on in the western search area was reporting itself on AIS as the Maersk Wave. The Intelligent Agent reported that there were two 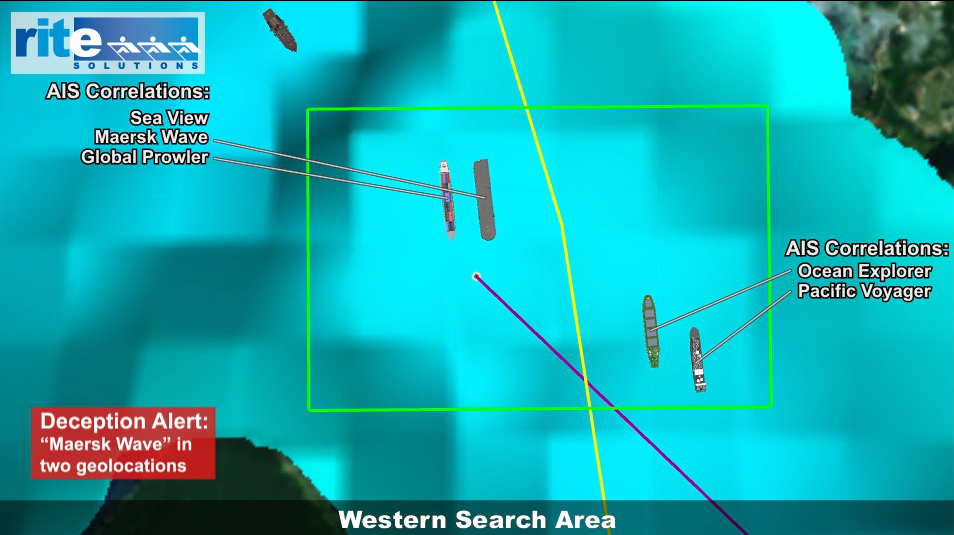 vessels at sea globally with that name, although only one was registered. Very shortly afterward, a Coast Guard operator in Alaska reported more information via the Intelligent Agent about the Maersk Wave, indicating that its normal routes were not in this part of the world. Often, a key outcome of the Intelligent Agent system was that relevant, real-time information would come to New England from U.S. military people all over the world. It was like having dozens more people on the team, not just the 15 who were working in the submarine’s control room. So it was very likely that Iron Fist was posing deceptively as the Maersk Wave.
vessels at sea globally with that name, although only one was registered. Very shortly afterward, a Coast Guard operator in Alaska reported more information via the Intelligent Agent about the Maersk Wave, indicating that its normal routes were not in this part of the world. Often, a key outcome of the Intelligent Agent system was that relevant, real-time information would come to New England from U.S. military people all over the world. It was like having dozens more people on the team, not just the 15 who were working in the submarine’s control room. So it was very likely that Iron Fist was posing deceptively as the Maersk Wave.
The Intelligent Agent soon began to report the UUVs acoustic and hull measurement relationships on both vessels. These were presented to human operators as “density maps,” a form of visualization that illustrated the correlation of acoustic and spatial measurements against the Iron Fist’s known standards—the more “dense” the map, the more likely that the vessel was, in fact, the Iron Fist. In this case, it was clear that the western candidate was much more likely to be the Iron Fist, and a quick review of the other 12 alerts on other vessels we investigated during the mission showed that they looked much like the less-dense eastern candidate.
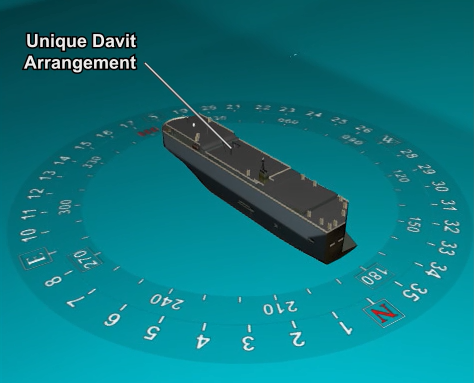 Based on the density maps, and the probability of deception, the Commanding Officer decided to launch the UAV against the western vessel. Because the Iron Fist had a number of unique visual identifiers, the UAV would be able to make a positive visual identification before placing a tracking sensor on the stern of the vessel. Since it was nighttime, the UAV would use its infrared sensor for the visual analysis. The UAV was launched, and the Intelligent Agent made a visual assessment as the UAV flew around the vessel. Before long, the Intelligent Agent positively identified Iron Fist’s unique davit arrangement and ventilation intake, and the Commanding Officer was satisfied that he met the Rules of Engagement for attaching the sensor to the hull.
Based on the density maps, and the probability of deception, the Commanding Officer decided to launch the UAV against the western vessel. Because the Iron Fist had a number of unique visual identifiers, the UAV would be able to make a positive visual identification before placing a tracking sensor on the stern of the vessel. Since it was nighttime, the UAV would use its infrared sensor for the visual analysis. The UAV was launched, and the Intelligent Agent made a visual assessment as the UAV flew around the vessel. Before long, the Intelligent Agent positively identified Iron Fist’s unique davit arrangement and ventilation intake, and the Commanding Officer was satisfied that he met the Rules of Engagement for attaching the sensor to the hull.
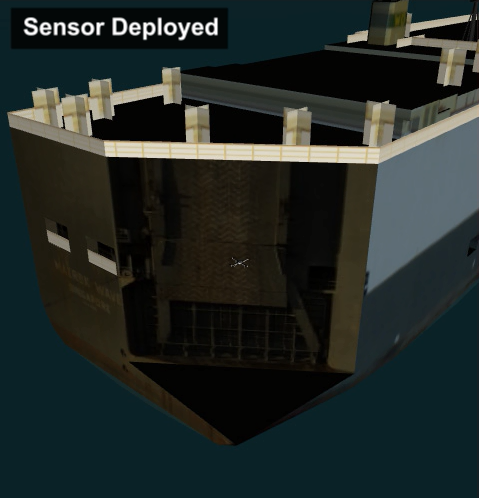 The flight operator directed the UAV to attach the sensor to the stern of the Iron Fist. Once the tracking sensor was activated and verified by an Air Force operator in Kansas, the USS New England’s mission was complete.
The flight operator directed the UAV to attach the sensor to the stern of the Iron Fist. Once the tracking sensor was activated and verified by an Air Force operator in Kansas, the USS New England’s mission was complete.
Three days later, the U.S. Special Forces successfully boarded the Iron Fist and confirmed that she was, in fact, carrying the contraband materials.
For a video presentation of this post please visit Information Advantage Demonstration: How An Intelligent Agent Increases the Probability of Mission Success